

Componentes y tecnología de OXION
En esta sección mostramos los componentes principales del robot y su función dentro del prototipo: control, movimiento, sensores, alimentación, aspiración y conexionado electrónico.
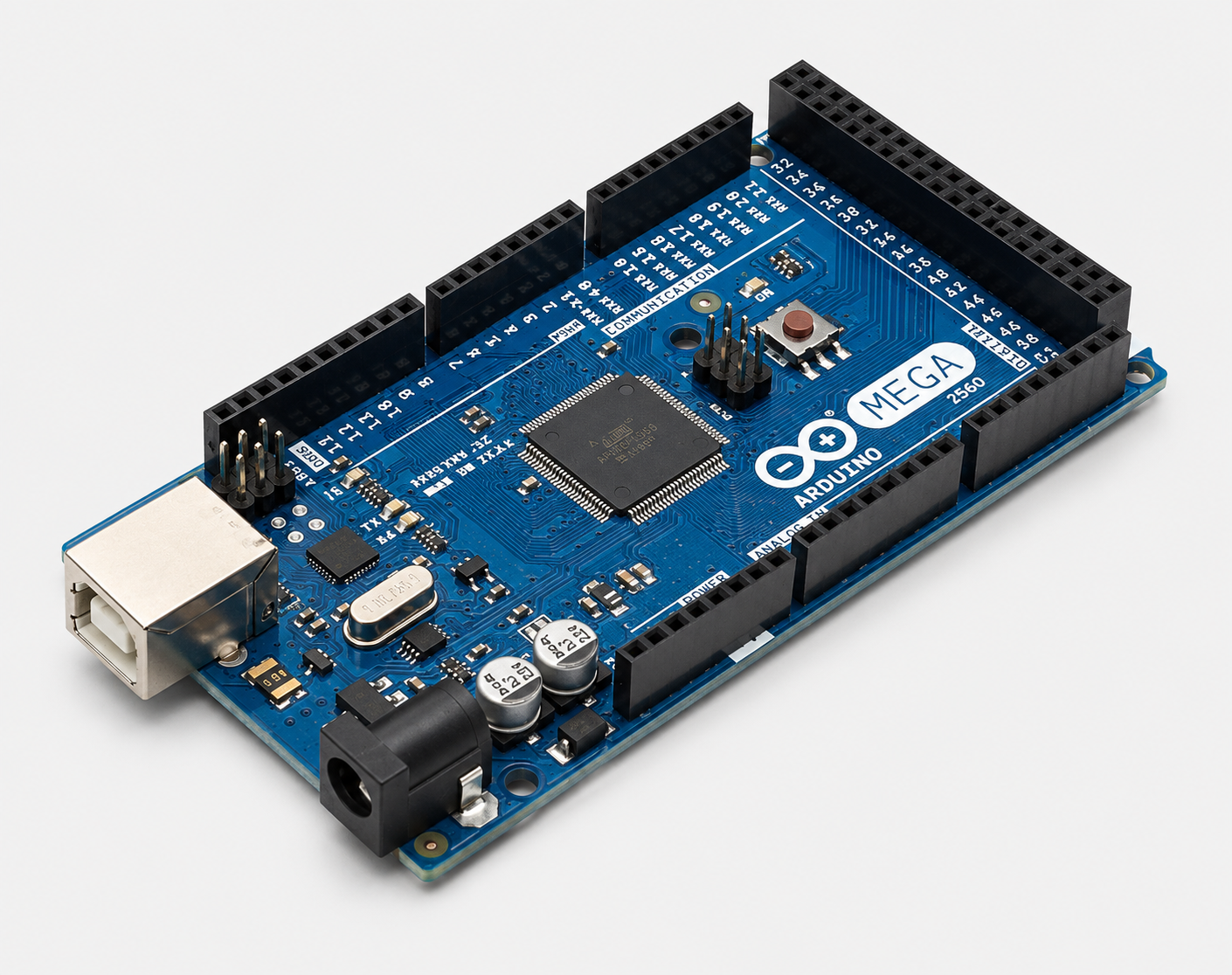
Arduino Mega 2560
El cerebro de OXION es su placa Arduino Mega, que actúa como la unidad de control principal. Este potente microcontrolador recibe y procesa la información de todos los sensores y, a su vez, envía las órdenes precisas a los motores y al sistema de aspiración. Es el encargado de tomar decisiones para que el robot se mueva y reaccione al entorno de forma inteligente.
Sensores
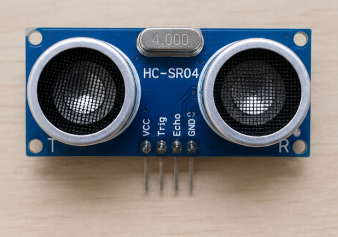
Ultrasonidos HC-SR04
OXION está equipado con sensores ultrasónicos e infrarrojos para interactuar con su entorno. Estos sensores son los ojos y oídos del robot, detectando obstáculos, paredes y desniveles. La información que recogen es enviada a Arduino Mega, que la interpreta para que el robot pueda decidir cuándo avanzar, detenerse, girar o cambiar de dirección, evitando colisiones y caídas.

Infrarrojos FC-51
Batería
La batería de 5V proporciona la energía necesaria para alimentar el sistema electrónico y los motores del robot. Permite que OXION funcione de forma autónoma sin depender de una fuente externa de alimentación.

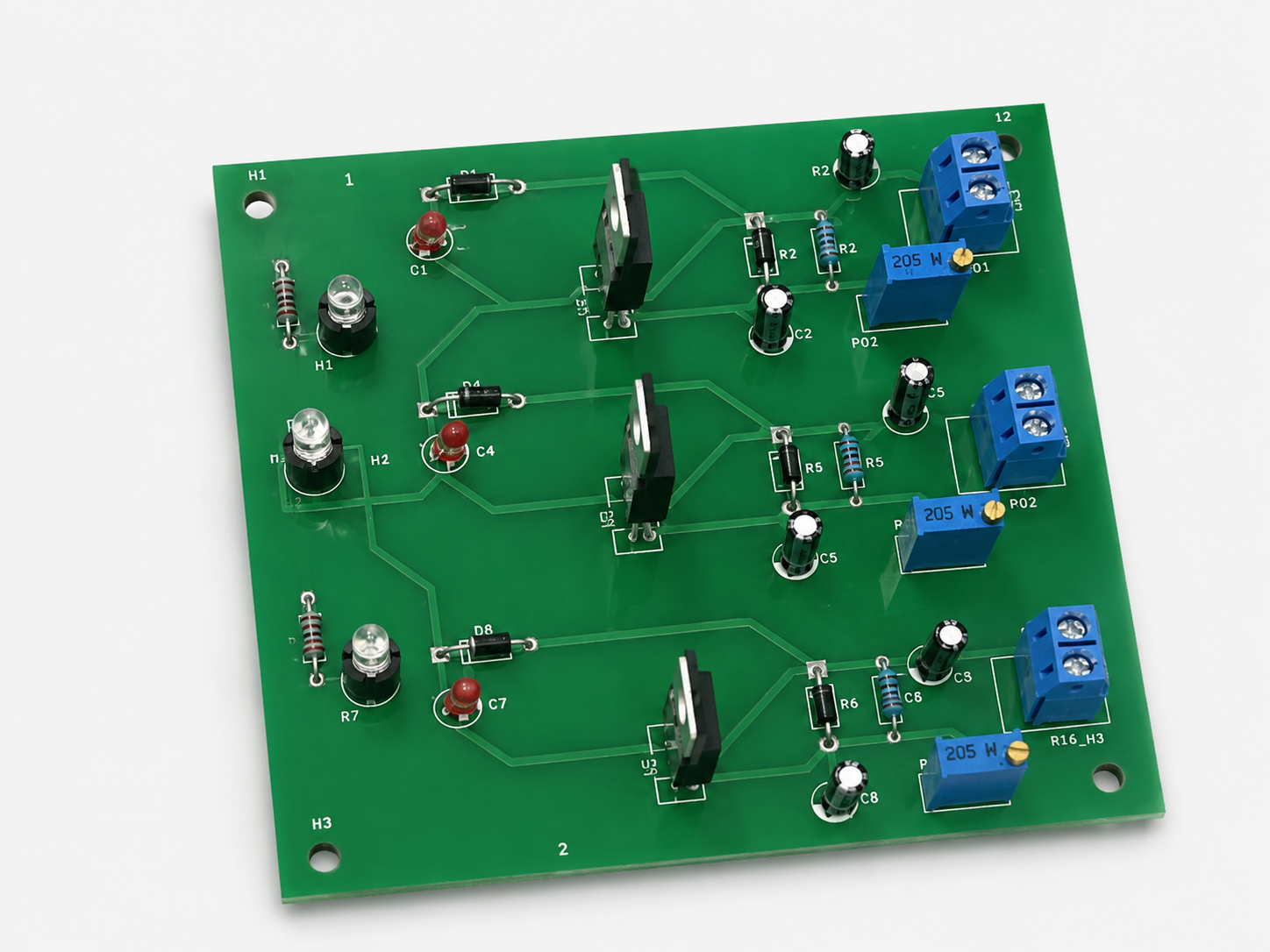
La PCB
La PCB permite organizar el conexionado del robot, distribuir la alimentación y conectar los distintos módulos de forma más ordenada y segura. Si incorpora reguladores de tensión, también ayuda a adaptar la alimentación necesaria para cada componente, reduciendo cables sueltos y posibles falsos contactos.

Motores DC
OXION utiliza 4 motores DC JGA25-370. Estos motores son los encargados de generar el movimiento principal del robot y accionar algunos elementos del sistema de limpieza.
Dos motores se utilizan para mover las ruedas, permitiendo que el robot avance, retroceda y gire. Los otros motores se emplean para accionar la escobilla lateral y el rodillo, ayudando a dirigir la suciedad hacia la zona de aspiración.
Su control se realiza mediante el driver de motores, que recibe las órdenes desde Arduino y permite gestionar el sentido de giro y el movimiento del robot.
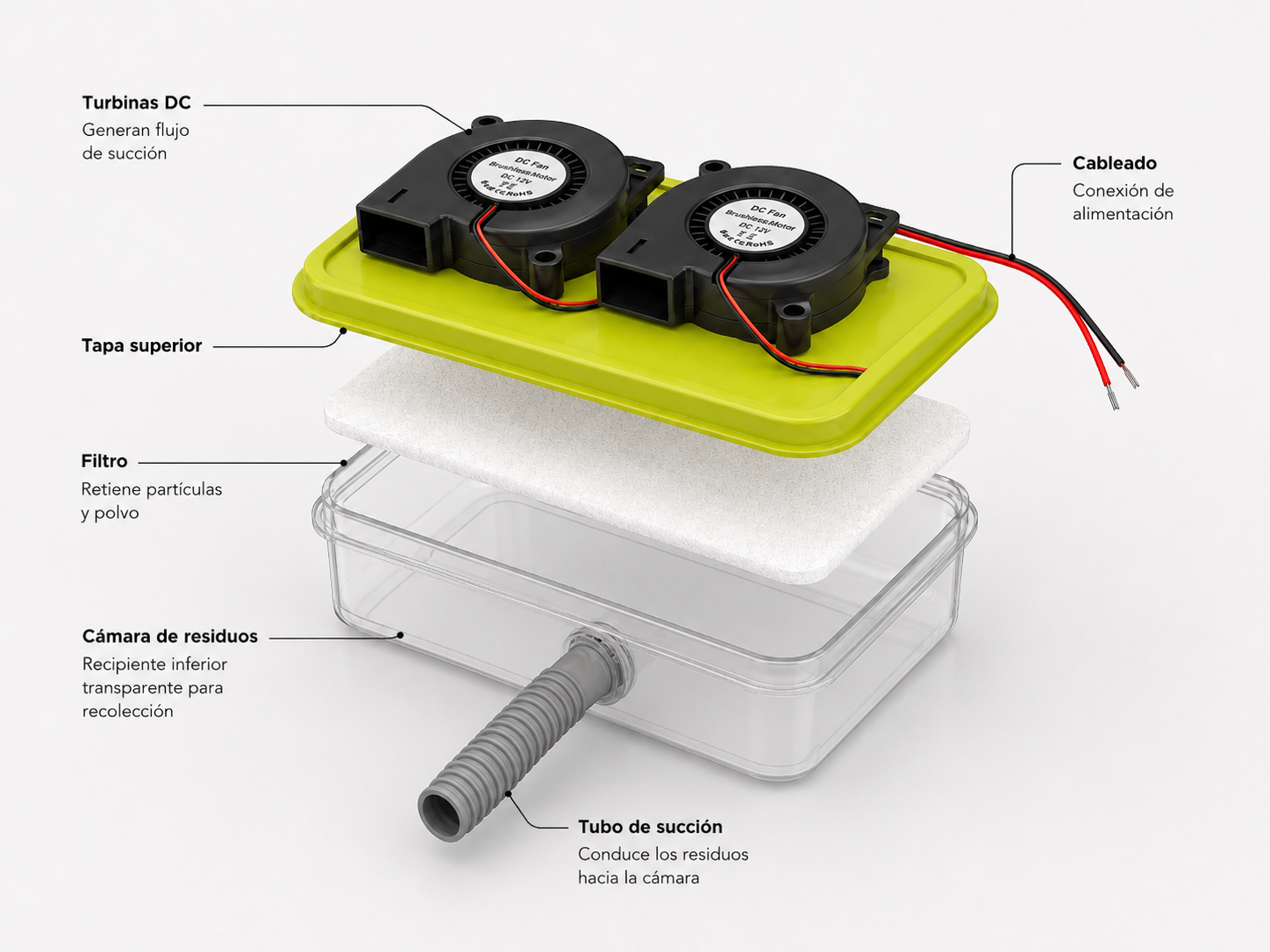
Deposito y sistema de aspiración
El sistema de aspiración está formado por un depósito fabricado con materiales reutilizados, dos turbinas DC y un tubo de entrada lateral. Su función es generar flujo de aire para conducir la suciedad hacia la cámara de residuos, donde queda almacenada durante el funcionamiento del robot.
OTROS COMPONENTES

La escobilla lateral empuja la suciedad de los bordes y zonas cercanas hacia el interior del robot, facilitando que el sistema de aspiración pueda recogerla.

El rodillo ayuda a recoger la suciedad situada bajo el robot y dirigirla hacia la zona de aspiración. Su movimiento mejora la capacidad de limpieza del prototipo.
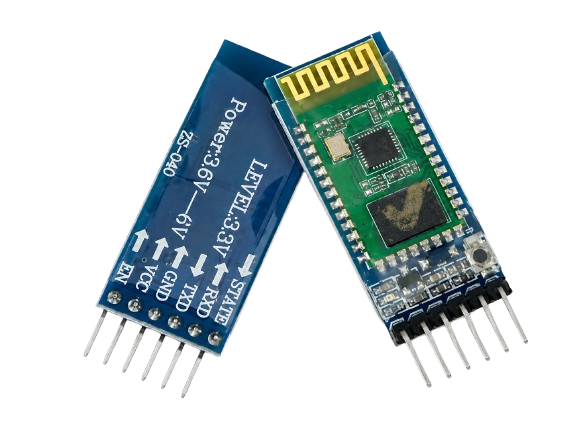
El módulo Bluetooth permite la comunicación inalámbrica con el robot. Su función es facilitar el control o envío de órdenes desde un dispositivo externo, como un teléfono móvil, durante las pruebas del prototipo.

El driver de motores L9110 se encarga de controlar los motores DC del robot. Recibe las señales desde Arduino y permite decidir el sentido de giro de los motores, haciendo posible que OXION avance, retroceda o gire.

El módulo semáforo LED se utiliza como indicador visual del estado del robot. Sus luces pueden mostrar diferentes situaciones, como encendido, funcionamiento normal, detección de obstáculos o aviso durante las pruebas.

La mini protoboard se utiliza para organizar conexiones entre Arduino, sensores y otros módulos, permitiendo unir varios cables de forma sencilla sin necesidad de soldadura directa.
Crea tu propia página web con Webador